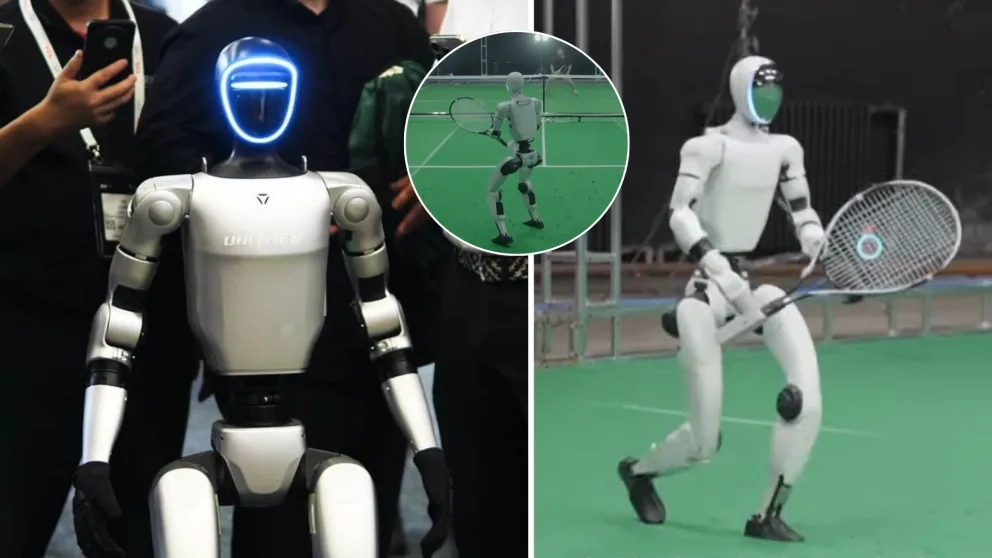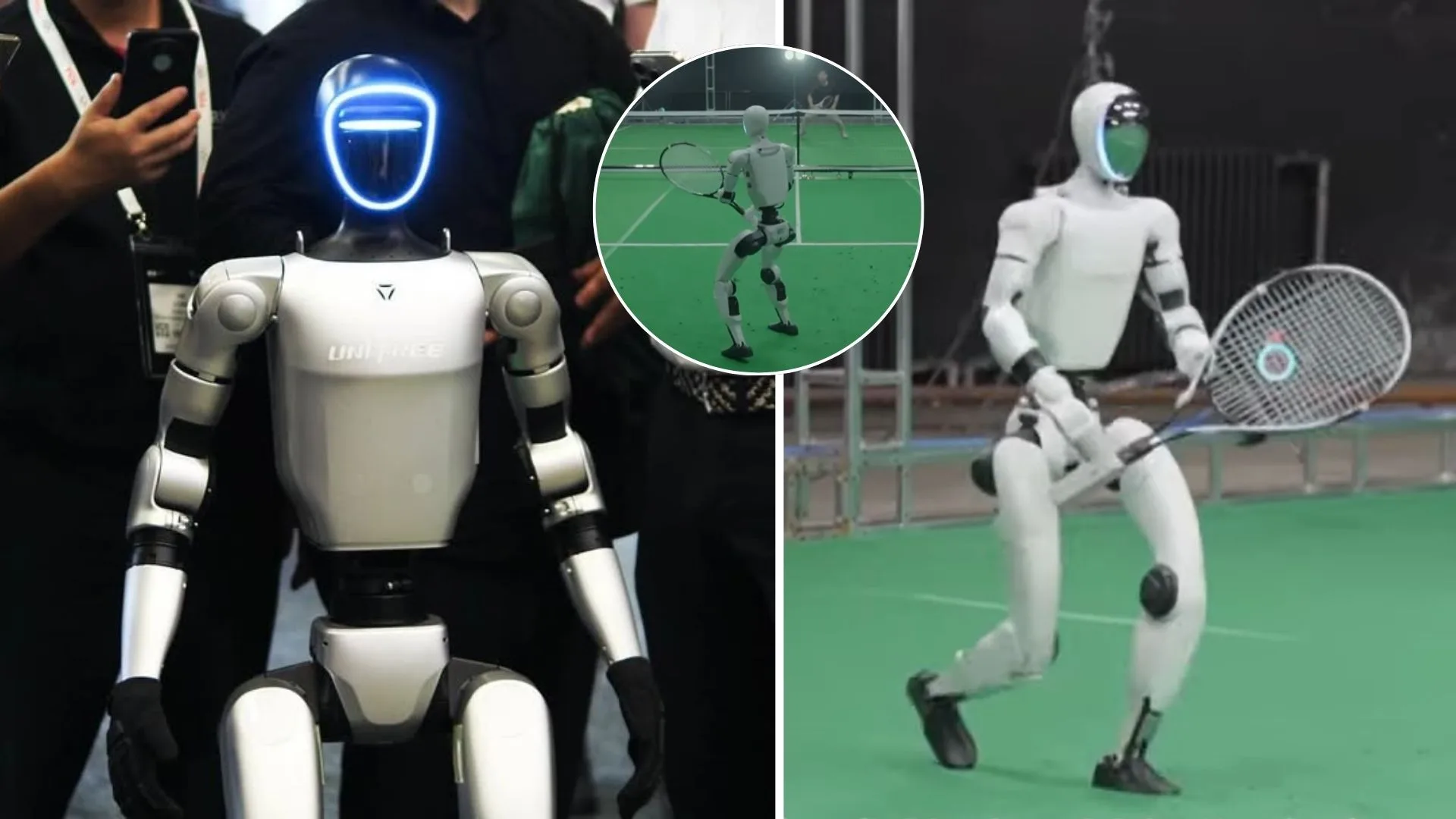
Video humanoidného robota, ktorý si dokáže zahrať tenis s človekom, ešte donedávna pripomínalo skôr sci-fi predstavy než reálnu technológiu. Nedávna ukážka však naznačila, že takýto scenár už nie je iba fikciou. Na internete sa objavil záznam robota Unitree G1, ktorý počas tréningu dokázal reagovať na tenisovú loptičku a udržať výmenu s ľudským hráčom.
Ako uvádza portál Futurism, za demonštráciou stojí čínska spoločnosť Galbot. V prezentácii ukázala humanoidný stroj vybavený tenisovou raketou, ktorý sa pohybuje po kurte, sleduje trajektóriu lopty a pokúša sa ju vracať späť. Na videu je viditeľná koordinácia celého tela – robot pracuje s nohami, načasovaním úderu aj pohybom rúk, čo je pri takýchto zariadeniach mimoriadne náročné.

Roboty dnes zvládajú množstvo úloh v priemysle alebo logistike. V továrňach pomáhajú pri montáži vozidiel, v skladoch triedia zásielky a v rôznych technologických prezentáciách predvádzajú choreografie či jednoduché interakcie s ľuďmi. Dynamické športy však predstavujú podstatne komplikovanejší test, pretože vyžadujú rýchle vyhodnocovanie situácie a okamžitú reakciu na meniace sa podmienky.
Zdroj: YouTube/CGTN Sports Scene
Práve preto je tenis vhodnou skúškou schopností humanoidných robotov. Stroj musí sledovať pohyb loptičky, odhadnúť jej budúcu dráhu a v správnej chvíli vykonať presný pohyb. Podľa vývojárov dokázal Unitree G1 reagovať v časových intervaloch meraných na milisekundy a zvládnuť viacero úderov v jednej výmene.
Treba však dodať, že ukážka mala skôr charakter experimentu než plnohodnotného športového súboja. Človek, ktorý s robotom hral, prispôsobil tempo hry tak, aby robot dokázal situácie spracovať. Aj tak však ide o technologický pokrok, keďže samotné udržanie výmeny si vyžaduje kombináciu viacerých zložitých schopností.
Stále je čo zlepšovať
Veľká časť vývoja prebiehala mimo reálneho kurtu. Robot sa totiž trénoval najmä vo virtuálnom prostredí, kde systém využíval metódu posilňovaného učenia. V simulácii bolo možné prehrať tisíce situácií za krátky čas, čo by pri fyzickom testovaní trvalo výrazne dlhšie.
Preniesť tieto skúsenosti zo simulácie do skutočného sveta však nie je jednoduché. Reálne prostredie obsahuje množstvo faktorov, ktoré počítačový model nedokáže dokonale napodobniť – napríklad trenie, odpor vzduchu či drobné odchýlky v motoroch. Jedným z hlavných úspechov projektu preto bolo, že robot dokázal použiť virtuálne naučené pohyby aj v skutočnom prostredí bez toho, aby stratil rovnováhu.

Vývojári pritom robotovi nedali presný návod na každú situáciu. Namiesto toho mu poskytli súbor základných pohybových vzorcov, z ktorých si systém dokázal vytvoriť vlastné riešenia pri rôznych herných situáciách. Dôležitú úlohu zohráva aj mechanická konštrukcia. Tenisový úder vytvára výraznú silu, ktorú musí robot zvládnuť bez poškodenia komponentov. Elektrické motory v humanoidných robotických systémoch majú pritom svoje obmedzenia a prudké pohyby môžu predstavovať značnú záťaž.
Ďalším limitujúcim faktorom je spotreba energie. Neustále vyhodnocovanie situácie, udržiavanie rovnováhy a koordinácia pohybov vyžadujú veľký výkon. Preto je pravdepodobné, že robot dokáže intenzívne fungovať len relatívne krátky čas, kým sa nezačne prejavovať prehrievanie alebo pokles výkonu.
Ľudská percepcia
Zaujímavý je aj spôsob, akým ľudia vnímajú humanoidné roboty pri podobných aktivitách. Keď stroj vykonáva pohyby podobné tým ľudským, nepôsobí už len ako technické zariadenie, ale skôr ako aktívny partner v interakcii. Podľa vývojárov by podobný prístup mohol nájsť využitie aj mimo športu. Technológia by sa dala použiť v situáciách, kde je potrebné reagovať na dynamické prostredie alebo kde neexistujú presné dáta o tom, ako má robot vykonať konkrétnu úlohu.
Aj keď ukážka robota hrajúceho tenis vyzerá pôsobivo, ide zatiaľ len o jednu etapu vývoja. Stroj síce dokázal reagovať na prichádzajúce loptičky a udržať výmenu, no technológia je stále vo fáze experimentov. Skôr než o hotové riešenie ide o náznak toho, kam sa robotika môže v najbližších rokoch posunúť.